Teoría
En este apartado encontraréis algunas claves teóricas necesarias para resolver los problemas de álgebra.
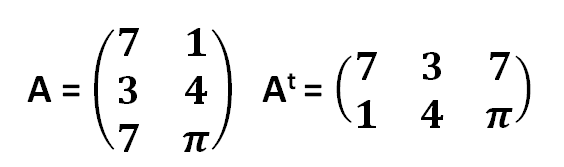
Matriz traspuesta
Se trata de algo que veréis constantemente a la hora de hacer ecuaciones matriciales y matrices inversas.
La matriz traspuesta de otra es aquella cuyas columnas son las filas de la primera y viceversa, tal como ves en la imagen.
La matriz traspuesta de otra es aquella cuyas columnas son las filas de la primera y viceversa, tal como ves en la imagen.
sistemas de ecuaciones lineales
Todo sistema de ecuaciones puede expresarse en forma matricial, como vemos en la imagen:
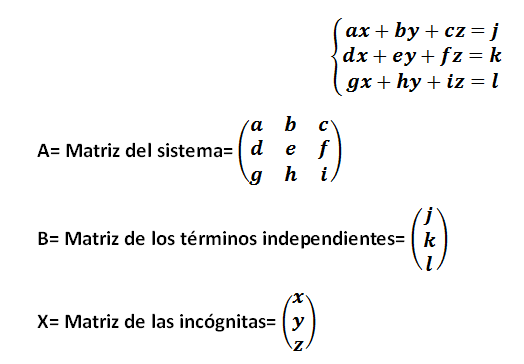
En base a esto, hay tres maneras de resolver un sistema de ecuaciones lineales:
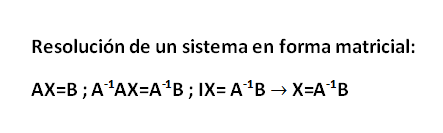
- Resolución de un sistema en forma matricial; en este caso procedemos como si estuviéramos ante una ecuación matricial corriente para despejar la matriz de las incógnitas:
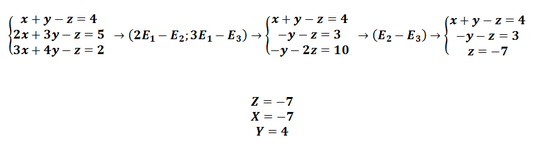
- Método de Gauss; nos permite resolver un sistema aplicando el método de reducción para hallar sistemas equivalentes hasta despejar una de las incógnitas, y a partir de ella, resolver el resto del sistema:
- Método de Cramer, el cual se basa, en primer lugar, en hallar el determinante de la matriz del sistema. A continuación, para despejar cada incógnita, se hace el determinante de la matriz del sistema, pero sustituyendo la columna correspondiente a la incógnita que vamos a despejar por la matriz de los términos independientes. Una vez hecho este determinante, lo dividimos entre el de la matriz del sistema, hallado al principio. Un ejemplo aplicado de este método lo tenéis en la sección "SISTEMAS DE ECUACIONES", concretamente en el apartado b) del primer problema, a la que podéis acceder con un click en el botón :
RANGO DE una mATRIZ
El rango de una matriz es el número de líneas (filas o columnas) linealmente independientes. Para calcularlo, podemos aplicar determinantes.
Dada una matriz A:
Esta matriz es de orden 3x2 (3 filas, 2 columnas), por lo que su máximo rango posible es 2 (la cifra más baja de su orden).
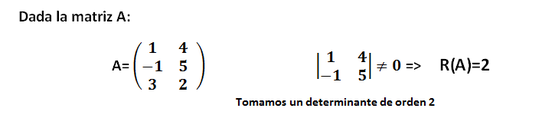
Para calcular el rango tomaremos un determinante de orden 2: si su resultado es distinto de 0, confirmamos que el rango de la matriz es 2. Si todos los determinantes de orden 2 posibles diesen 0 como resultado, tendríamos que coger ahora determinantes del orden inmediatamente inferior, y en esta caso obtendríamos que el rango sería 1. Veámoslo:
Dada una matriz A:
Esta matriz es de orden 3x2 (3 filas, 2 columnas), por lo que su máximo rango posible es 2 (la cifra más baja de su orden).
Para calcular el rango tomaremos un determinante de orden 2: si su resultado es distinto de 0, confirmamos que el rango de la matriz es 2. Si todos los determinantes de orden 2 posibles diesen 0 como resultado, tendríamos que coger ahora determinantes del orden inmediatamente inferior, y en esta caso obtendríamos que el rango sería 1. Veámoslo:
Teorema de Rouché fROBENIUS
Conociendo el concepto de rango de una matriz y de sistemas de ecuaciones lineales, el teorema de Rouché-Frobenius nos permite clasificar los sistemas en función de su número de soluciones en tres tipos:
- Sistema incompatible: cuando el rango de la matriz del sistema A es distinto del de la matriz ampliada del sistema A* (matriz formada por la matriz del sistema y la columna que constituye la matriz de los términos independientes) el sistema no tiene solución.
- Sistema compatible determinado: cuando el rango de la matriz del sistema y de la matriz ampliada coinciden y son además iguales al número de incógnitas. Tiene una única solución.
- Sistema compatible indeterminado: cuando el rango de la matriz del sistema y de la matriz ampliada coinciden pero difieren del número de incógnitas.Tiene infinitas soluciones.
